ubuntu14.04安裝ROS indigo
阿新 • • 發佈:2019-02-19
ROS(RobotOperating System)為開源的機器人作業系統,Ubuntu版本中的ROS的安裝步驟如下:
1.配置Ubuntu知識庫
安裝ROS前要先進行Ubuntu知識庫的配置,按照“Ubuntu軟體中心-->編輯-->軟體源”的順序進入知識庫設定介面,如圖1所示:
c.可從光碟機安裝:根據自己安裝Ubuntu軟體的需要來勾選,我們安裝ROS是從網上下載安裝,所以不選擇“可從光碟機安裝”,”Ubuntu軟體”這一欄配置如圖2所示:
5)附加驅動:該頁面設定也暫且不管。
完成Ubuntu知識庫配置後,點選“關閉”儲存退出。
注:如有不明白或者想了解詳細資料請訪問https://help.ubuntu.com/community/Repositories/Ubuntu。
2.安裝ROS源列表:
3.安裝使用者金鑰:
接著輸入如下命令從伺服器下載金鑰匯入到本地(可從Ubuntu知識庫中的身份驗證頁面檢視):
4.安裝軟體:
首先輸入如下指令進行重新整理:
7.gettingrosinstall
輸入如下指令執行:
ROS安裝的詳細內容可以參考http://wiki.ros.org/indigo/Installation/Ubuntu。
為了驗證自己安裝好了ROS,在剛才的終端中輸入roscore命令,然後再開啟一個終端,依次輸入如下指令:
1.配置Ubuntu知識庫
安裝ROS前要先進行Ubuntu知識庫的配置,按照“Ubuntu軟體中心-->編輯-->軟體源”的順序進入知識庫設定介面,如圖1所示:

圖1
1)Ubuntu軟體:a.可從網際網路下載:mian、universe、restricted和multiverse前面打勾,原始碼前面不打勾。
b.下載伺服器:下載伺服器可以隨便選,建議選擇國內的,我選擇的是http://mirrors.tuna.tsinghua.edu.cn,以後更改需要使用者密碼驗證(如果後面輸命令時系統提示命令找不到時,請回到這兒更改伺服器站點,最好用我用的那個)。
c.可從光碟機安裝:根據自己安裝Ubuntu軟體的需要來勾選,我們安裝ROS是從網上下載安裝,所以不選擇“可從光碟機安裝”,”Ubuntu軟體”這一欄配置如圖2所示:

圖2
2)其他軟體:該頁面顯示的四個選項全部勾選,如圖3所示:
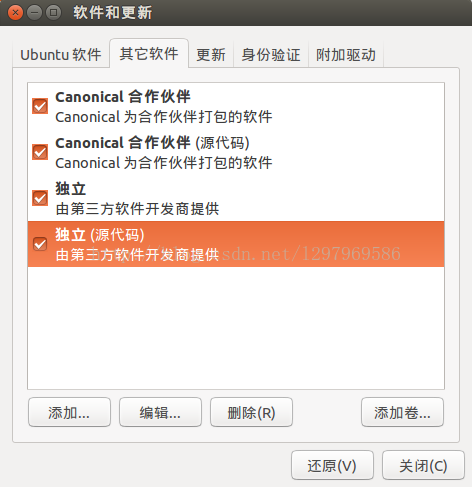
圖3
3)更新:這一頁面可以自主地選擇,預設頁面如圖4所示:
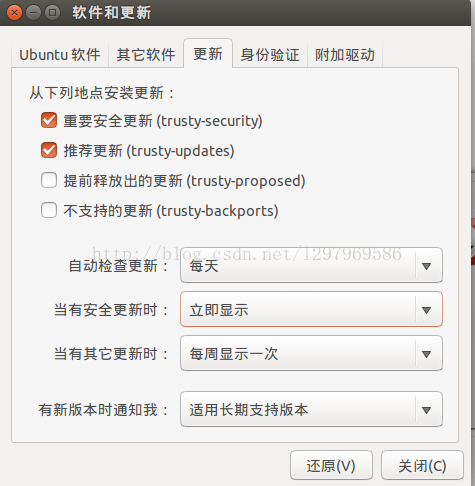
圖4
4)身份驗證:該頁面設定暫且不管。5)附加驅動:該頁面設定也暫且不管。
完成Ubuntu知識庫配置後,點選“關閉”儲存退出。
注:如有不明白或者想了解詳細資料請訪問https://help.ubuntu.com/community/Repositories/Ubuntu。
2.安裝ROS源列表:
同時按住Ctrl+Alt+T開啟終端,在終端中輸入如下命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu$(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
3.安裝使用者金鑰:
接著輸入如下命令從伺服器下載金鑰匯入到本地(可從Ubuntu知識庫中的身份驗證頁面檢視):
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key0xB01FA1164.安裝軟體:
首先輸入如下指令進行重新整理:
sudo apt-get update接下來安裝ROS包,為了滿足今後各種機器人模擬的需求,我們選擇Desktop-Full版本,輸入如下指令進行安裝:
sudo apt-get install ros-indigo-desktop-full執行到一半會提示:您希望繼續執行嗎?[Y/n],選擇Y回車繼續,等待安裝。安裝完成的介面如圖5所示:
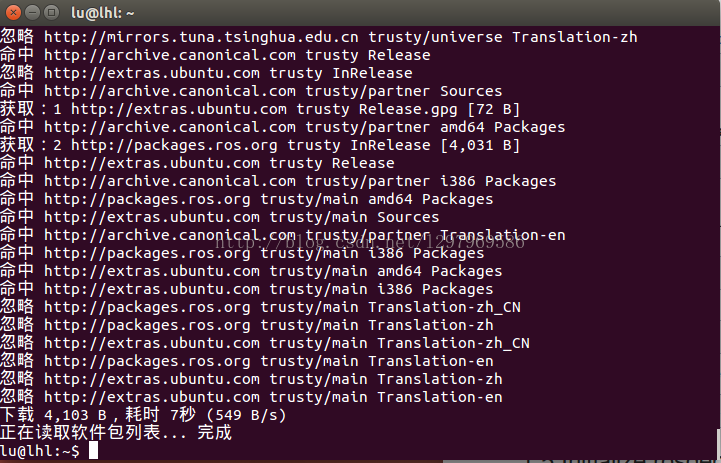
圖5
5初始化rosdep(ROS的依賴項)
輸入如下指令進行依賴項的初始化,注意下面為三條指令,依次輸入:
apt-cache search ros-indigo
sudo rosdep init
rosdep update初始化完成後的介面如圖6所示:
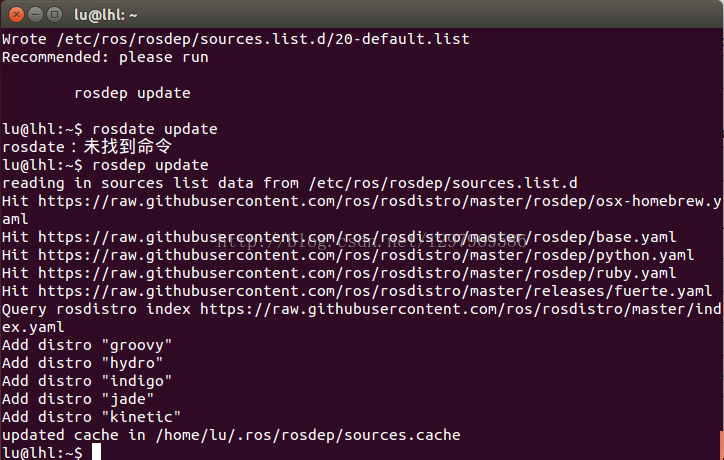
圖6
6.環境安裝
輸入如下命令執行即可:
source /opt/ros/indigo/setup.bash7.gettingrosinstall
輸入如下指令執行:
sudo apt-get install python-rosinstall執行到一半,系統會給出提示:您希望繼續執行嗎?選擇Y後回車繼續,完成後的介面如圖7所示:
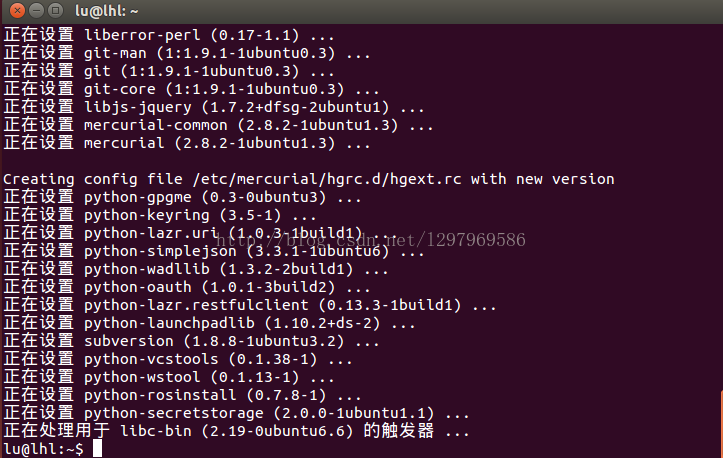
圖7
到這兒整個ROS環境的安裝就已經完成了。ROS安裝的詳細內容可以參考http://wiki.ros.org/indigo/Installation/Ubuntu。
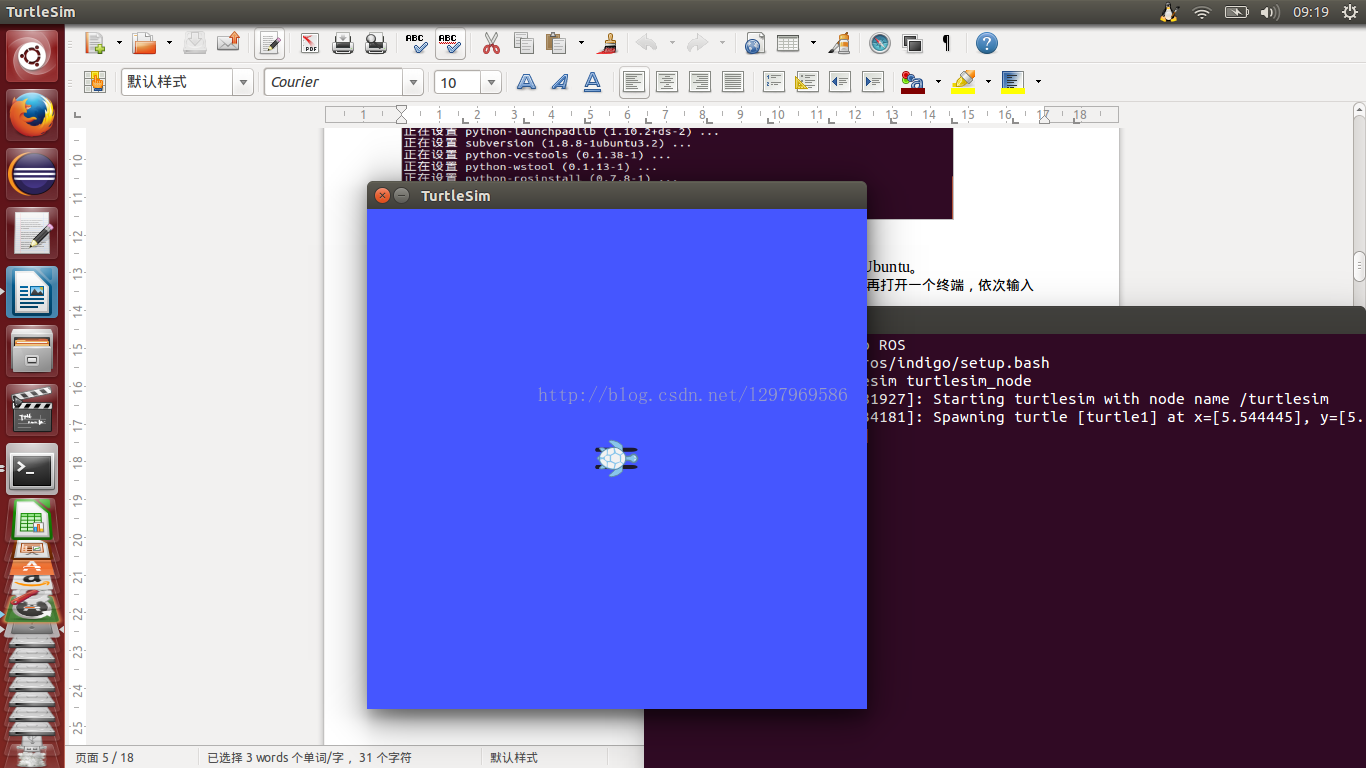
為了驗證自己安裝好了ROS,在剛才的終端中輸入roscore命令,然後再開啟一個終端,依次輸入如下指令:
roscore
export| grep ROS
source/opt/ros/indigo/setup.bash
rosrun turtlesim turtlesim_node這時我們會看到一個藍色的視窗,該視窗正中間有一隻小烏龜,如圖8所示,說明安裝成功。