
【論文筆記】One Millisecond Face Alignment with an Ensemble of Regression Trees
參考文獻:
Kazemi V, Sullivan J. One millisecond face alignment with an ensemble of regression trees[C]//Computer Vision and Pattern Recognition (CVPR), 2014 IEEE Conference on. IEEE, 2014: 1867-1874
簡介
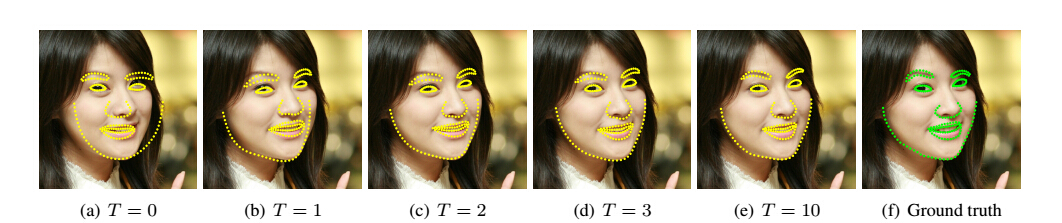
CVPR 2014的一篇關於人臉關鍵點檢測的論文,基於Ensemble of Regression Tress演算法(以下簡稱 ERT),速度極快(單人人臉關鍵點檢測耗時約為1ms),效果也不錯。同時又能處理訓練集中部分關鍵點標定缺失的情況。
dlib 庫中(http://dlib.net/),有這個演算法的完整實現,包括訓練和測試部分。
有paper,有code,對我們這些搞演算法的底層人員,真是再happy不過了。
演算法介紹
LBF(Face Alignment at 3000 FPS via Regressing Local Binary Features)這篇論文也是基於Tree的人臉關鍵點檢測演算法。LBF是基於Tree的方法,學習每個關鍵點的區域性二值特徵,然後將特徵組合起來,使用線性迴歸檢測關鍵點。與 LBF 不同的是, ERT 是在學習 Tree的過程中,直接將
用公式來表示:
其中
為了訓練每一級的
每個迴歸器由很多棵樹(tree)組成,每棵樹引數是根據 current shape 和 ground truth 的座標差和隨機挑選的畫素對訓練得到的。具體演算法可詳見論文(我還沒有完全理解清楚)。
總結
跑過dlib程式碼後,使用預設引數,基本能夠重現論文結果。不像LBF演算法,無論怎麼調參也很難達到論文中的結果。
速度跟LBF是一個數量級,精度也與SDM稍好一些,缺點就是模型稍大了些(基於隨機樹的演算法似乎都是這樣)。
後續還要進一步研究演算法和論文。