
影象邊緣檢測——canny運算元原理與程式碼
轉自:http://blog.csdn.net/dcrmg/article/details/5234490
另有:http://blog.csdn.net/likezhaobin/article/details/6892629
http://blog.csdn.net/ftxv95x5/article/details/55657534
http://blog.csdn.net/tigerda/article/details/61192943 參考
常見邊緣檢測運算元:Roberts 、Sobel 、Prewitt、Laplacian、Log/Marr、Canny、Kirsch、Nevitia
一階微分運算元:Roberts 、Sobel 、Prewitt
二階微分運算元:Laplacian、Log/Marr非微分邊緣檢測運算元:Canny
Canny邊緣檢測演算法是澳大利亞科學家John F. Canny在1986年提出來的,不得不提一下的是當年John Canny本人才28歲!到今天已經30年過去了,Canny演算法仍然是影象邊緣檢測演算法中最經典、有效的演算法之一。
一起睹一下大家Canny的風采:
John Canny研究了最優邊緣檢測方法所需的特性,給出了評價邊緣檢測效能優劣的3個指標:
- 1 好的信噪比,即將非邊緣點判定為邊緣點的概率要低,將邊緣點判為非邊緣點的概率要低;
- 2 高的定位效能,即檢測出的邊緣點要儘可能在實際邊緣的中心;
- 3 對單一邊緣僅有唯一響應,即單個邊緣產生多個響應的概率要低,並且虛假響應邊緣應該得到最大抑制;
Canny運算元邊緣檢測的具體步驟如下:
- 一、用高斯濾波器平滑影象
- 二、用Sobel等梯度運算元計算梯度幅值和方向
- 三、對梯度幅值進行非極大值抑制
- 四、用雙閾值演算法檢測和連線邊緣
一、用高斯濾波器平滑影象
高斯濾波是一種線性平滑濾波,適用於消除高斯噪聲,特別是對抑制或消除服從正態分佈的噪聲非常有效。濾波可以消除或降低影象中噪聲的影響,
1.1 彩色RGB影象轉換為灰度影象
邊緣檢測是基於對影象灰度差異運算實現的,所以如果輸入的是RGB彩色影象,需要先進行灰度圖的轉換。 RGB轉換成灰度影象的一個常用公式是: Gray = R*0.299 + G*0.587 + B*0.114 C++程式碼實現起來也比較簡單,注意一般情況下影象處理中彩色影象各分量的排列順序是B、G、R。 [cpp] view plain copy print?- //******************灰度轉換函式*************************
- //第一個引數image輸入的彩色RGB影象;
- //第二個引數imageGray是轉換後輸出的灰度影象;
- //*************************************************************
- void ConvertRGB2GRAY(const Mat &image,Mat &imageGray)
- {
- if(!image.data||image.channels()!=3)
- {
- return ;
- }
- imageGray=Mat::zeros(image.size(),CV_8UC1);
- uchar *pointImage=image.data;
- uchar *pointImageGray=imageGray.data;
- int stepImage=image.step;
- int stepImageGray=imageGray.step;
- for(int i=0;i<imageGray.rows;i++)
- {
- for(int j=0;j<imageGray.cols;j++)
- {
- pointImageGray[i*stepImageGray+j]=0.114*pointImage[i*stepImage+3*j]+0.587*pointImage[i*stepImage+3*j+1]+0.299*pointImage[i*stepImage+3*j+2];
- }
- }
- }

1.2 生成高斯濾波卷積核
高斯濾波的過程是將灰度影象跟高斯卷積核卷積,所以第一步是先要求解出給定尺寸和Sigma的高斯卷積核引數,以下程式碼實現對卷積核引數求解: [cpp] view plain copy print?- //******************高斯卷積核生成函式*************************
- //第一個引數gaus是一個指向含有N個double型別陣列的指標;
- //第二個引數size是高斯卷積核的尺寸大小;
- //第三個引數sigma是卷積核的標準差
- //*************************************************************
- void GetGaussianKernel(double **gaus, constint size,constdouble sigma)
- {
- constdouble PI=4.0*atan(1.0); //圓周率π賦值
- int center=size/2;
- double sum=0;
- for(int i=0;i<size;i++)
- {
- for(int j=0;j<size;j++)
- {
- gaus[i][j]=(1/(2*PI*sigma*sigma))*exp(-((i-center)*(i-center)+(j-center)*(j-center))/(2*sigma*sigma));
- sum+=gaus[i][j];
- }
- }
- for(int i=0;i<size;i++)
- {
- for(int j=0;j<size;j++)
- {
- gaus[i][j]/=sum;
- cout<<gaus[i][j]<<" ";
- }
- cout<<endl<<endl;
- }
- return ;
- }
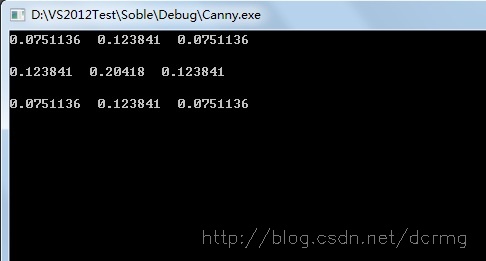
Sigma為1,5*5大小的高斯卷積核引數為:
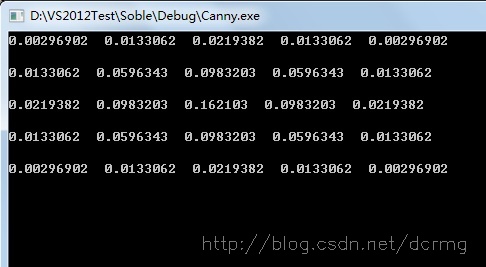
以下運算中Canny運算元使用的是尺寸5*5,Sigma為1的高斯核。
1.3 高斯濾波
用在1.2中生成的高斯卷積核跟灰度影象卷積,得到灰度影象的高斯濾波後的影象,抑制噪聲。 程式碼實現: [cpp] view plain copy print?- //******************高斯濾波*************************
- //第一個引數imageSource是待濾波原始影象;
- //第二個引數imageGaussian是濾波後輸出影象;
- //第三個引數gaus是一個指向含有N個double型別陣列的指標;
- //第四個引數size是濾波核的尺寸
- //*************************************************************
- void GaussianFilter(const Mat imageSource,Mat &imageGaussian,double **gaus,int size)
- {
- imageGaussian=Mat::zeros(imageSource.size(),CV_8UC1);
- if(!imageSource.data||imageSource.channels()!=1)
- {
- return ;
- }
- double gausArray[100];
- for(int i=0;i<size*size;i++)
- {
- gausArray[i]=0; //賦初值,空間分配
- }
- int array=0;
- for(int i=0;i<size;i++)
- {
- for(int j=0;j<size;j++)
- {
- gausArray[array]=gaus[i][j];//二維陣列到一維 方便計算
- array++;
- }
- }
- //濾波
- for(int i=0;i<imageSource.rows;i++)
- {
- for(int j=0;j<imageSource.cols;j++)
- {
-
相關推薦
影象邊緣檢測——canny運算元原理與程式碼
轉自:http://blog.csdn.net/dcrmg/article/details/5234490 另有:http://blog.csdn.net/likezhaobin/article/details/6892629 http:/
邊緣檢測---Canny運算元
http://www.cnblogs.com/techyan1990/p/7291771.html 1.Canny邊緣檢測演算法可以分為以下5個步驟: 1) 使用高斯濾波器,以平滑影象,濾除噪聲。 2)&
5.4.3 邊緣檢測-canny運算元
Canny運算元是John Canny於20世紀80年代提出的一種多級邊緣檢測演算法。John Canny研究了最優邊緣的特性,即檢測到的邊緣要儘可能跟實際的邊緣接近並儘可能的多,同時,要儘量降低噪聲對邊緣檢測的干擾。其計算步驟如下 1)對源影象進行高斯平滑以消除影象中噪聲 2)採用差分法近似計
OpenCV3邊緣檢測:Canny運算元/Sobel運算元/Laplace運算元/Scharr濾波器
邊緣檢測的一般步驟 1)濾波:邊緣檢測的演算法主要是基於影象強度的一階和二階導數,但導數通常對噪聲很敏感,因此必須採用濾波器來改善與噪聲有關的邊緣檢測器的效能。常見的濾波方法主要有高斯濾波,即採用離散化的高斯函式產生一組歸一化的高斯核(具體見“高斯濾波原理及其程式設計離散化實現方法”
【OpenCV入門教程之十二】OpenCV邊緣檢測 Canny運算元 Sobel運算元 Laplace運算元 Scharr濾波
本篇文章中,我們將一起學習OpenCV中邊緣檢測的各種運算元和濾波器——Canny運算元,Sobel運算元,Laplace運算元以及Scharr濾波器。文章中包含了五個淺墨為大家準備的詳細註釋的博文配套原始碼。在介紹四塊知識點的時候分別一個,以及最後的綜合示例中的一個。文章末尾
影象邊緣檢測—sobel運算元(灰度影象,彩色影象)
void CShowPicView::Ontwodimension() { CShowPicDoc* pDoc = GetDocument(); CDC* pDC=GetDC(); // 字串 CString str; int x,y; int i,n; x=intHeight; y=int
影象邊緣檢測經典運算元及MATLAB實現
一、邊緣檢測 邊緣是圖象最基本的特徵. 邊緣檢測在計算機視覺、圖象分析等應用中起著重要的作用,是圖象分析與識別的重要環節,這是因為子圖象的邊緣包含了用於識別的有用資訊. 所以邊緣檢測是影象分析和模式識別的主要特徵提取手段。所謂邊緣是指其周圍畫素灰度後階變化或屋頂狀變化的
梯度與邊緣檢測常用運算元:Roberts、Prewitt、Sobel、LOG,Canny、Lapacian運算元
原文:https://blog.csdn.net/swj110119/article/details/51777422 原文:https://blog.csdn.net/gdut2015go/article/details/46779251 幾種邊緣檢測運算元的比較Robert
Canny邊緣檢測算法原理及其VC實現詳解(一)
常用 差分 實現圖 還需要 鏈接 傳感器 出了 關系 位置 轉自:http://blog.csdn.net/likezhaobin/article/details/6892176 圖象的邊緣是指圖象局部區域亮度變化顯著的部分,該區域的灰度剖面一般可以看作是一個階躍,既從
0032-使用OpenCV對影象作邊緣檢測(Canny、Sobel、Laplace)
邊緣檢測是影象處理和計算機視覺中的基本問題,邊緣檢測的目的是標識數字影象中亮度變化明顯的點。影象屬性中的顯著變化通常反映了屬性的重要事件和變化。 這些包括(i)深度上的不連續、(ii)表面方向不連續、(iii)物質屬性變化和(iv)場景照明變化。 邊緣檢測是影象處理和計算機視覺中,尤其是特徵提取中的
影象邊緣檢測——幾種影象邊緣檢測運算元的學習及python 實現
本文學習利用python學習邊緣檢測的濾波器,首先讀入的圖片程式碼如下: import cv2 from pylab import * saber = cv2.imread("construction.jpg") saber = cv2.cvtColor(saber,cv2.COLOR_BGR2RG
梯度與邊緣檢測常用運算元:Roberts、Prewitt、Sobel、Lapacian運算元
原文;https://blog.csdn.net/swj110119/article/details/51777422 一、學習心得: 學習影象處理的過程中,剛開始遇到影象梯度和一些運算元的概念,這兩者到底是什麼關係,又有什麼不同,一直困擾著我。後來在看到影象分
影象邊緣檢測-運算元比較總結
一階導數運算元 1, Roberts運算元:對具有陡峭的低噪聲的影象處理效果較好。形式如下: [100−1] [
影象邊緣檢測與邊緣增強處理——(Roberts、prewitt、sobel)
堅持寫下去,雖然簡單,但希望可以幫助到別人,有不足之處還望指教目的:對影象採用3種邊緣檢測運算元進行處理,比較處理後的結果,並用邊緣增強演算法對影象增強。一、基本原理1.1影象邊緣 影象邊緣是影象最基本的特徵之一,往往攜帶著一幅影象的大部分資訊。而邊緣存在於影象的不規則結
我的CUDA學習之旅4——Sobel運算元影象邊緣檢測CUDA實現
引言 關於影象邊緣檢測,記得剛開始接觸影象處理時,第一個自己實現的程式是通過筆記本攝像頭採集影象,利用OpenCV自帶的演算法庫進行Canny運算元邊緣檢測,那時候當看到程式執行後,視訊視窗實時顯示經Canny運算元邊緣分割後的影象,覺得十分有科技感,後來慢慢
【OpenCV影象處理入門學習教程四】基於LoG運算元的影象邊緣檢測
一、基於LoG運算元的影象邊緣檢測原圖:1.LoG運算元與自定義濾波運算元進行比較的結果:2.LoG運算元的結果:3.自定義3*31 1 1 1 -8 1 1 1 1 濾波結果:二、程式碼解析下面是一段基於LoG運算元的影象邊緣檢測的程式碼,同時會生成兩個結果,一個是LoG運算元的結果,第二個是自
OpenCV使用Canny邊緣檢測器實現影象邊緣檢測
效果圖 原始碼 Canny邊緣檢測器是一種被廣泛使用的演算法,並被認為是邊緣檢測最優的演算法,該方法使用了比高斯差分演算法更復雜的技巧,如多向灰度梯度和滯後閾值化。 Canny
5.4.4 邊緣檢測-拉普拉斯運算元
拉普拉斯運算元是一個二階邊緣運算元,即梯度的散度。拉普拉斯運算元的實現也是通過模板實現。常用的拉普拉斯模板定義如下: &nb
5.4.2 邊緣檢測-sobel運算元
Sobel運算元也是一種常用的梯度運算元。Sobel運算元計算稍微複雜,它採用3x3的模板。計算時模板在影象上移動,並在每個位置上計算對應中心畫素的梯度值。 VTK中vtkSobel2D計算影象的sobel運算元,使用程式碼如下: /*-----------------------
5.4.1 邊緣檢測—梯度運算元
影象中不連續的灰度值會產生邊緣,影象的邊緣檢測是基於邊界的影象分割方法,如分水嶺演算法,通常是分割原圖的梯度影象,梯度實際上也是反應的影象邊緣資訊。影象邊緣一般常用影象一階導數和二階導數來檢測。 梯度運算元對應於影象一階導數。影象一階導數計算一般是通過差分運算來近似的。VTK中可以使用vtkIm