
新增 – EC2 Auto Scaling 的目標跟蹤策略
最近我介紹過 DynamoDB Auto Scaling,並演示了它如何使用多個 CloudWatch 警報來實現 DynamoDB 表的自動容量管理。此功能在後臺使用了一種更為通用的 Application Auto Scaling 模型,我們計劃以後逐漸在多項不同 AWS 服務中投入使用該模型。
這一新的 Auto Scaling 模型包括一項重要的新功能,我們稱之為目標跟蹤。在建立使用目標跟蹤的 Auto Scaling 策略時,需要為特定 CloudWatch 指標選擇一個目標值。然後,Auto Scaling 旋轉相應的旋鈕 (打個比方) 推動指標趨向於目標,同時調整相關的 CloudWatch 警報。比起使用初始步進擴充套件策略型別來手動設定範圍和閾值而言,採用對應用程式有意義的任何指標驅動的單元來指定期望的目標,通常來說要更簡單,也更為直接。不過,您可以結合使用目標跟蹤和步進擴充套件來實現高階擴充套件策略。例如,您可以使用目標跟蹤實現擴充套件操作,使用步進擴充套件實現縮減操作。
現在面向 EC2
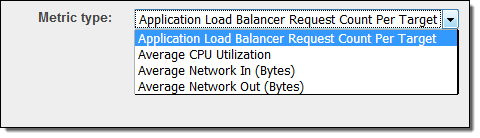
現在我們為 EC2 Auto Scaling 增加了目標跟蹤支援。您現在可以建立應用程式負載均衡器請求計數、CPU 負載、網路流量或自定義指標 (Request Count per Target 是新指標,也是在今天釋出) 驅動的擴充套件策略:
這些指標都具有同一個重要的特性:新增額外的 EC2 例項會推動指標下降 (但不會改變總體負載),反之亦然。
要建立使用目標跟蹤的 Auto Scaling 組,只需輸入策略名稱、選擇一個指標,然後設定所需的目標值:

- 只要每個目標引用不同的指標,您可以在單個 Auto Scaling 組中跟蹤多個目標。擴充套件始終選擇能推動實現最高容量的策略。
- 如果指標資料不足,則不會擴充套件。
- Auto Scaling 會補償指標快速、瞬時的波動,盡力將相應的容量波動減到最小。
- 大多數情況下,您應該選擇根據基於 1 分鐘頻率 (也稱為詳細監控) 釋出的指標進行擴充套件。根據基於 5 分鐘的指標進行擴充套件,將導致響應時間變慢。
現已推出
這項新功能現已推出,您可以立即開始使用,無需額外費用。要了解更多資訊,請閱讀《Auto Scaling 使用者指南》中的目標跟蹤擴充套件。
-Jeff