
STM32串列埠USART1程式(受啟發,前進一步)
阿新 • • 發佈:2019-01-09
原理圖: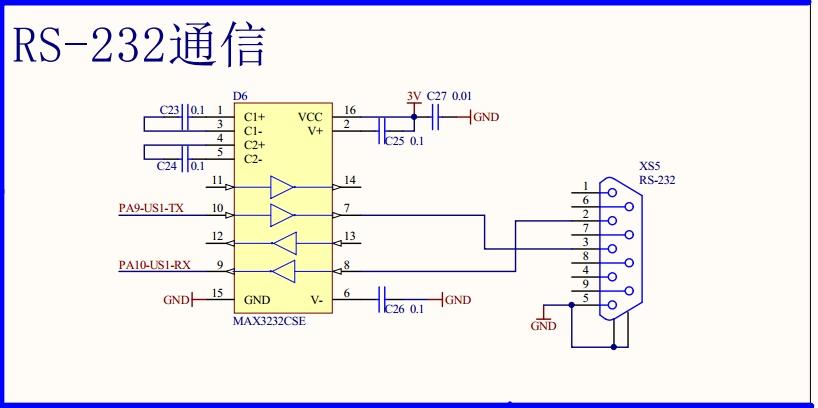
/*****
/*****
初始化GPIO口,TX:GPIO_Mode_Out_PP ,RX:GPIO_Mode_AF_PP,PB5為低電平 void GPIO_Configuration(void) { GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1控制--PB5 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推輓輸出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); /* 預設複用功能 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //複用推輓輸出 GPIO_Init(GPIOA, &GPIO_InitStructure); //A埠 /* 複用功能的輸入引腳必須配置為輸入模式(浮空/上拉/下拉的一種)*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //複用浮空輸入 GPIO_Init(GPIOA, &GPIO_InitStructure); //A埠 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //LCD背光控制 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOD, &GPIO_InitStructure); GPIO_ResetBits(GPIOD, GPIO_Pin_13); //LCD背光關閉 }
初始化USART1 ,允許傳送,接收中斷 void USART_Config(USART_TypeDef* USARTx){ USART_DeInit(USART1); USART_InitStructure.USART_BaudRate = 9600;//速率115200bps USART_InitStructure.USART_WordLength = USART_WordLength_8b;//資料位8位 USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位1位 USART_InitStructure.USART_Parity = USART_Parity_No;//無校驗位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //無硬體流控 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收發模式 /* Configure USART1 */ USART_Init(USART1, &USART_InitStructure);//配置串列埠引數函式 /* Enable USART1 Receive and Transmit interrupts */ USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中斷 USART_ITConfig(USART1, USART_IT_TXE, ENABLE);//使能傳送緩衝空中斷 //USART_ClearFlag(USART1, USART_FLAG_TC ); /* Enable the USART1 */ USART_Cmd(USART1, ENABLE); }
/*****傳送函式*****/
void USART_OUT(USART_TypeDef* USARTx, uint8_t *Data,...){ const char *s; int d; char buf[16]; va_list ap; va_start(ap, Data); while(*Data!=0){ //判斷是否到達字串結束符 if(*Data==0x5c){//'\' switch (*++Data){ case 'r'://回車符 USART_SendData(USARTx, 0x0d); //傳送0X0d Data++; break; case 'n': //換行符 USART_SendData(USARTx, 0x0a); Data++; break; default: Data++; break; } } else if(*Data=='%'){// switch (*++Data){ case 's'://字串 s = va_arg(ap, const char *); for ( ; *s; s++) { USART_SendData(USARTx,*s); while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET); } Data++; break; case 'd'://十進位制 d = va_arg(ap, int); itoa(d, buf, 10); for (s = buf; *s; s++) { USART_SendData(USARTx,*s); while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET); } Data++; break; default: Data++; break; } } else USART_SendData(USARTx, *Data++); while(USART_GetFlagStatus(USARTx, USART_FLAG_TC)==RESET); } }
/*****中斷函式*****/
void USART1_IRQHandler(void) //串列埠1 中斷服務程式 { unsigned int i; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判斷讀暫存器是否非空 { RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1); //將讀暫存器的資料快取到接收緩衝區裡 if(RxBuffer1[RxCounter1-2]==0x0d&&RxBuffer1[RxCounter1-1]==0x0a) //判斷結束標誌是否是0x0d 0x0a { for(i=0; i< RxCounter1; i++) TxBuffer1[i]= RxBuffer1[i]; //將接收緩衝器的資料轉到傳送緩衝區,準備轉發 rec_f=1;//接收成功標誌 TxBuffer1[RxCounter1]=0; //傳送緩衝區結束符 RxCounter1=0; } } if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET) { USART_ITConfig(USART1, USART_IT_TXE, ENABLE); } }