
Python中openCV庫實現卡爾曼濾波案例
阿新 • • 發佈:2018-12-16
1.0 什麼是卡爾曼模型
理論推導過於複雜,看個知乎上的解釋吧 假設你有兩個感測器,測的是同一個訊號。可是它們每次的讀數都不太一樣,怎麼辦? 取平均。 再假設你知道其中貴的那個感測器應該準一些,便宜的那個應該差一些。那有比取平均更好的辦法嗎? 加權平均。 怎麼加權?假設兩個感測器的誤差都符合正態分佈,假設你知道這兩個正態分佈的方差,用這兩個方差值,(此處省略若干數學公式),你可以得到一個“最優”的權重。 接下來,重點來了:假設你只有一個感測器,但是你還有一個數學模型。模型可以幫你算出一個值,但也不是那麼準。怎麼辦? 把模型算出來的值,和感測器測出的值,(就像兩個感測器那樣),取加權平均。
總而言之,kalman濾波用在當測量值與模型預測值均不準確的情況下,用來計算預測真值的一種濾波方法。這在目標識別與追蹤任務中經常用到。
2.0 Python實戰–2維位置跟蹤
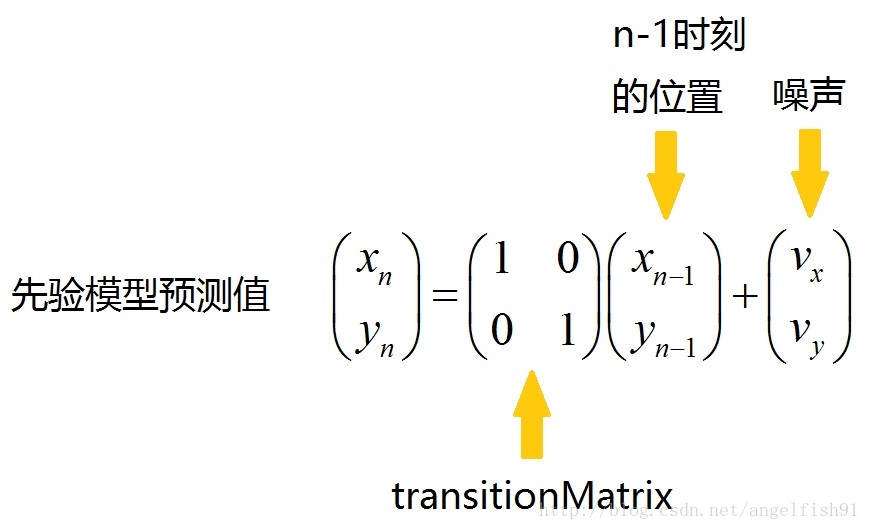
在這個例子中,我們知道2維位置測量值mes_x,mes_y。並且我們的先驗模型預測值為model_x,model_y。我們通過kalman filter來預測真值的大小。首先來建立2維運動追蹤模型,即上的model。在這個例子中,我們的model位置預測值設定為n時刻的位置由n-1時刻的位置加上一個隨機噪聲決定,如下圖所示。
python 程式如下
import cv2 import numpy as np import matplotlib.pyplot as plt pos = np.array([ [10, 50], [12, 49], [11, 52], [13, 52.2], [12.9, 50]], np.float32) ''' 它有3個輸入引數,dynam_params:狀態空間的維數,這裡為2;measure_param:測量值的維數,這裡也為2; control_params:控制向量的維數,預設為0。由於這裡該模型中並沒有控制變數,因此也為0。 ''' kalman = cv2.KalmanFilter(2,2) kalman.measurementMatrix = np.array([[1,0],[0,1]],np.float32) kalman.transitionMatrix = np.array([[1,0],[0,1]], np.float32) kalman.processNoiseCov = np.array([[1,0],[0,1]], np.float32) * 1e-3 kalman.measurementNoiseCov = np.array([[1,0],[0,1]], np.float32) * 0.01 ''' kalman.measurementNoiseCov為測量系統的協方差矩陣,方差越小,預測結果越接近測量值,kalman.processNoiseCov為模型系統的噪聲,噪聲越大,預測結果越不穩定,越容易接近模型系統預測值,且單步變化越大,相反,若噪聲小,則預測結果與上個計算結果相差不大。 ''' kalman.statePre = np.array([[6],[6]],np.float32) for i in range(len(pos)): mes = np.reshape(pos[i,:],(2,1)) x = kalman.correct(mes) y = kalman.predict() print (kalman.statePost[0],kalman.statePost[1]) print (kalman.statePre[0],kalman.statePre[1]) print ('measurement:\t',mes[0],mes[1]) print ('correct:\t',x[0],x[1]) print ('predict:\t',y[0],y[1]) print ('='*30)
3.0 Python實戰–加上2維速度的2維位置跟蹤(滑鼠跟蹤)
與上面一樣,首先要建立滑鼠運動的模型,至少有兩個狀態變數:滑鼠位置x,y,也可以是四個狀態變數:位置x,y和速度vx,vy。兩個測量變數:滑鼠位置x,y。由於滑鼠的運動是個隨機運動,並沒有一個精確複雜的數學模型。在粒子濾波博文中,也做過影象跟蹤,跟那裡程式類似的是,滑鼠的位置主要通過上一時刻的位置再疊加一個隨機噪聲來預測。

python程式如下
import cv2
import numpy as np
import matplotlib.pyplot as plt
frame = np.zeros((800,800,3),np.uint8)
last_mes = current_mes = np.array((2,1),np.float32)
last_pre = current_pre = np.array((2,1),np.float32)
def mousemove(event, x,y,s,p):
global frame, current_mes, mes, last_mes, current_pre, last_pre
last_pre = current_pre
last_mes = current_mes
current_mes = np.array([[np.float32(x)],[np.float32(y)]])
kalman.correct(current_mes)
current_pre = kalman.predict()
lmx, lmy = last_mes[0],last_mes[1]
lpx, lpy = last_pre[0],last_pre[1]
cmx, cmy = current_mes[0],current_mes[1]
cpx, cpy = current_pre[0],current_pre[1]
cv2.line(frame, (lmx,lmy),(cmx,cmy),(0,200,0))
cv2.line(frame, (lpx,lpy),(cpx,cpy),(0,0,200))
cv2.namedWindow("Kalman")
cv2.setMouseCallback("Kalman", mousemove)
kalman = cv2.KalmanFilter(4,2)
kalman.measurementMatrix = np.array([[1,0,0,0],[0,1,0,0]],np.float32)
kalman.transitionMatrix = np.array([[1,0,1,0],[0,1,0,1],[0,0,1,0],[0,0,0,1]], np.float32)
kalman.processNoiseCov = np.array([[1,0,0,0],[0,1,0,0],[0,0,1,0],[0,0,0,1]], np.float32) * 0.003
kalman.measurementNoiseCov = np.array([[1,0],[0,1]], np.float32) * 1
while(True):
cv2.imshow('Kalman',frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()