
PPM訊號介紹 以及PPM和PWM的關係
本系列文章是在學習PPM、 PWM、 SBUS、DSM2過程中的總結!
PPM訊號介紹
我們知道PWM訊號可以控制舵機,一般訊號週期是20ms,脈寬在500us~2500us之間。 實際上這種pwm訊號不僅可以控制舵機,航模中使用的電調(有刷和無刷)也是用這種訊號控制,只不過它們的脈寬範圍一般限制在1000us~2000us。 而航模接收機輸出的正是上述 週期20ms,脈寬1000us~2000us之間的pwm訊號。可以理解為,接收機通過pwm訊號來反映遙控器的操作。 航模遙控器有多路通道,可以傳輸多個操作(油門、方向等),而無線通道只有一路,怎麼把多路通道的pwm資訊傳輸到接收機呢?這就是所謂的PPM調製。 PPM訊號把多路PWM訊號調製到一路通道上,傳送到接收機後再由接收機還原成多路PWM從各個通道輸出。
注意上面說的PWM訊號和控制電機的PWM訊號不同。 控制電機的PWM訊號對週期沒有嚴格要求,佔空比變化範圍0~100%; 而航模遙控器接收機輸出的PWM訊號(也是控制舵機、電調的PWM訊號),週期一般是20ms,也有16ms的,正脈寬範圍一般是1000us~2000us。
以上是PPM訊號的介紹,我不關心PPM是如何調製的,更關心如何利用航模接收機輸出的PWM訊號,以下介紹的是航模接收機輸出PWM訊號。
電平
標準電平是5V(航模遙控器的接收機工作電壓是5v)。
工作方式
資訊以高電平脈衝寬度表示,以固定的頻率不斷地重新整理訊號; 在每個週期內,攜帶資訊的是高電平脈衝,高電平資訊結束後是持續的低電平。
重新整理率
標準重新整理率是50Hz(週期20ms),但也遇到過60Hz(週期約16ms)的接收機,如GR3E 3通道接收機。7通道接收機WFR07的週期是21.2ms。
脈寬和數值
脈寬變化範圍是1000us~2000us。 一般航模遙控器中: 方向、油門之類的雙向控制,中間值是1500us,兩個方向的極值分別是1000us和2000us; 模式切換按鈕,分別在1000us和2000us之間切換。 無刷電調沒有方向,在1000us時油門為0,2000us時油門最大。 注: 1、航模遙控器中,雙向控制專案一般都會有個中間值調節旋鈕,如果調節了中間值不是1500us,那麼另外兩個方向的極值也會隨著變化。總之輸出範圍是圍繞著中間值±500的範圍。 2、接收機輸出的PWM訊號可直接接到舵機,而一般舵機的脈寬範圍是500us~2500us,對應角度0°~180°。所以一般由接收機輸出的PWM訊號直接控制的舵機,旋轉角度範圍在45°~135°。
多路PWM訊號
航模遙控器中常說的“幾路通道”代表接收機能輸出幾路PWM訊號。 注意各個通道的PWM高電平不是同時輸出的,一路通道在前一路通道高電平輸出結束後才會開始,類似於這樣:
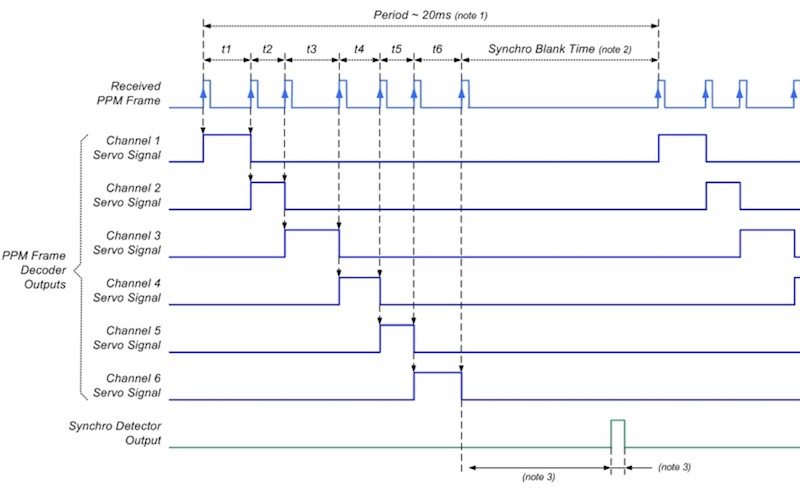
這是因為航模遙控器不能同時傳輸多路通道,只能單路傳輸,然後分給各個通道。遙控器的無線訊號類似於上面訊號的第一行,解調後變成了下面各路通道訊號。 注意,各個通道的高電平訊號是一個緊挨著一個的,而不是每個通道固定分配2ms的時間。 在對接收機解碼時發現,實際各個通道的正脈衝並不是一個緊挨著一個出現。有的接收機各個通道輸出的高電平連線比較近,而有的接收機在上一個通道正脈衝結束後要等較長的時間下一個通道的高電平才出現,在此期間所有的通道都是低電平。
由於單路訊號最長是2000us,週期20ms,所以理論上可以容納10路。而由於需要進行同步,實際上遙控器最多隻能容納9路訊號。 記住:接收機輸出的每幀訊號(20ms)裡,理論上最後必然有至少2ms的時間裡,所有的通道都輸出低電平,微控制器解碼時就是利用這一點來判斷一幀訊號結束的。
精度
PPM標準協議中不知道有沒有精度規定 ,實際 GT2B/GR3E 槍型遙控器 和 WFT07/WFR07飛機遙控器 的精度都是20us,
| 時間精度 | 調節範圍1000us,分成份數 | |
|---|---|---|
| 20us | 50 | 普通舵機500us~2500us對應角度180°,對應舵機角度解析度:1.8°。佔空比從 -100%到+100%,對應占空比解析度:4% |
PWM訊號和舵機
接收機輸出的PWM訊號可直接接到舵機,而一般舵機的脈寬範圍是500us~2500us,對應角度0°~180°。所以一般由PWM直接控制的舵機,旋轉角度範圍在45°~135°。
PWM訊號和電調
接收機輸出的PWM訊號可直接輸出給舵機,而在航模中經常會用這種PWM訊號控制電機(有刷和無刷),接收機輸出的PWM訊號是不能直接控制電機的,雖然最終控制電機的訊號也叫PWM,但兩種訊號是不同的,本文開頭有介紹。此時需要電調。 電調具有接收 接收機輸出的PWM訊號 和 驅動電機 的功能,不同的電機驅動方式不同(有刷和無刷,有感和無感)。簡單地說,電調的作用是接收 接收機輸出的PWM訊號 訊號,轉換成我們希望的電機驅動訊號,並通過內部的電機驅動電路實現對電機的控制。
微控制器提取接收機輸出的PWM訊號
根據此訊號的特性:
我們想要用微控制器提取並解釋PPM訊號可以有兩種方法: 1、獲取上圖最上面一行的PPM訊號,並解釋。 2、獲取接收機輸出的各路通道的PWM訊號,並解釋。 對於成品的接收機,獲取各路的輸出訊號要容易得多,所以採用第二種方法,直接把各路通道的輸出訊號接到微控制器。
另外在前面的介紹裡有說過:接收機輸出的每幀訊號(20ms)裡,理論上最後必然有至少2ms的時間裡,所有的通道都輸出低電平。我們可以利用這一點來判斷一幀訊號的結束。