
從零開始一起學習SLAM | 三維空間剛體的旋轉

剛體,顧名思義,是指本身不會在運動過程中產生形變的物體,如相機的運動就是剛體運動,運動過程中同一個向量的長度和夾角都不會發生變化。剛體變換也稱為歐式變換。
視覺SLAM中使用的相機就是典型的剛體,相機一般通過人手持、機載(安裝在機器人上)、車載(固定在車輛上)等方式在三維空間內運動,形式包括旋轉、平移、縮放、切變等。其中,剛體在三維空間中最重要的運動形式就是旋轉。那麼剛體的旋轉如何量化表達呢?
三維空間中剛體的旋轉表示
三維空間中剛體的旋轉總共有4種表示方法,高翔的十四講中的第3講比較詳細的講解了。本文提煉中最重要的內容,並加上實際使用過程中的經驗總結進行了歸納。下面按照重要順序分別進行介紹。
1 旋轉矩陣
1、SLAM程式設計中使用比較頻繁。需要重點掌握。
2、旋轉矩陣不是一般矩陣,它有比較強的約束條件。旋轉矩陣R具有正交性,R和R的轉置的乘積是單位陣,且行列式值為1。
3、旋轉矩陣R的逆矩陣表示了一個和R相反的旋轉。
4、旋轉矩陣R通常和平移向量t一起組成齊次的變換矩陣T,描述了歐氏座標變換。引入齊次座標是為了可以方便的描述連續的歐氏變換,這個在上一篇文章《從零開始一起學習SLAM | 為什麼要用齊次座標?》中有講解。
5、冗餘。用9個元素表示3個自由度的旋轉,比較冗餘。
2 四元數
1、SLAM程式設計中使用頻繁程度接近旋轉矩陣。稍微有點抽象,不太直觀,但是一定得掌握。
2、四元數由一個實部和三個虛部組成,是一種非常緊湊、沒有奇異的表達方式。
3、程式設計時候很多坑,必須注意。首先,一定要注意四元素定義中實部虛部和列印係數的順序不同,很容易出錯!

其次,單位四元素才能描述旋轉,所以四元素使用前必須歸一化:q.normalize()。
3 旋轉向量
1、用一個旋轉軸n和旋轉角θ來描述一個旋轉,所以也稱軸角。不過很明顯,因為旋轉角度有一定的週期性(360°一圈),所以這種表達方式具有奇異性。
2、從旋轉向量到旋轉矩陣的轉換過程稱為 羅德里格斯公式。這個推導比較麻煩,否則也不會有一個專屬的名字了。OpenCV和MATLAB中都有專門的羅德里格斯函式。
3、旋轉向量本身沒什麼出彩的,不過旋轉向量和旋轉矩陣的轉換關係,其實對應於李代數和李群的對映,這對於後面理解李代數很有幫助。
4 尤拉角
1、把一次旋轉分解成3次繞不同座標軸的旋轉,比如航空領域經常使用的“偏航-俯仰-滾轉”(yaw,pitch,roll)就是一種尤拉角。該表達方式最大的優勢就是直觀。
2、尤拉角在SLAM中用的很少,原因是它的一個致命缺點:萬向鎖。也就是在俯仰角為±90°時,第一次和第3次旋轉使用的是同一個座標軸,會丟失一個自由度,引起奇異性。事實上,想要表達三維旋轉,至少需要4個變數。
瞭解了四種旋轉的表達方式,那麼程式設計時如何使用呢?
矩陣線性代數運算庫Eigen
事實上,上述幾種旋轉的表達方式在一個第三方庫Eigen中已經定義好啦。Eigen是一個C++開源線性代數庫,安裝非常方便,Ubuntu下一行程式碼即可搞定:
sudo apt-get install libeigen3-dev
Eigen在SLAM程式設計中是必備基礎,必須熟練程式設計。關於Eigen,主要有以下幾點需要強調或注意。
1、Eigen庫不同於一般的庫,它只有標頭檔案,沒有.so和 .a那樣的二進位制庫檔案,所以在CMakeLists.txt裡只需要新增標頭檔案路徑,並不需要使用 target_link_libraries 將程式連結到庫上。
2、Eigen以矩陣為基本資料單元,在Eigen中,所有的矩陣和向量都是Matrix模板類的物件,Matrix一般使用3個引數:資料型別、行數、列數
Eigen::Matrix<typename Scalar, int rowsNum, int colsNum>
而向量只是一種特殊的矩陣(一行或者一列)。同時,Eigen通過typedef 預先定義好了很多內建型別,如下,我們可以看到底層仍然是Eigen::Matrix
typedef Eigen::Matrix<float, 4, 4> Matrix4f;
typedef Eigen::Matrix<float, 3, 1> Vector3f;
3、為了提高效率,對於已知大小的矩陣,使用時需要指定矩陣的大小和型別。如果不確定矩陣的大小,可以使用動態矩陣Eigen::Dynamic
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> matrix_dynamic;
4、Eigen在資料型別方面“很傻很天真”。什麼意思呢?就是使用Eigen時操作資料型別必須完全一致,不能進行自動型別提升。比如C++中,float型別加上double型別變數不會報錯,編譯器會自動將結果提升為double。但是在Eigen中float型別矩陣和double型別矩陣不能直接相加,必須統一為float或者double,否則會報錯。
5、Eigen除了空間幾何變換外,還提供了大量矩陣分解、稀疏線性方程求解等函式,非常方便。學習Eigen最好的方式就是官網:
http://eigen.tuxfamily.org/dox/
有非常多的示例參考。
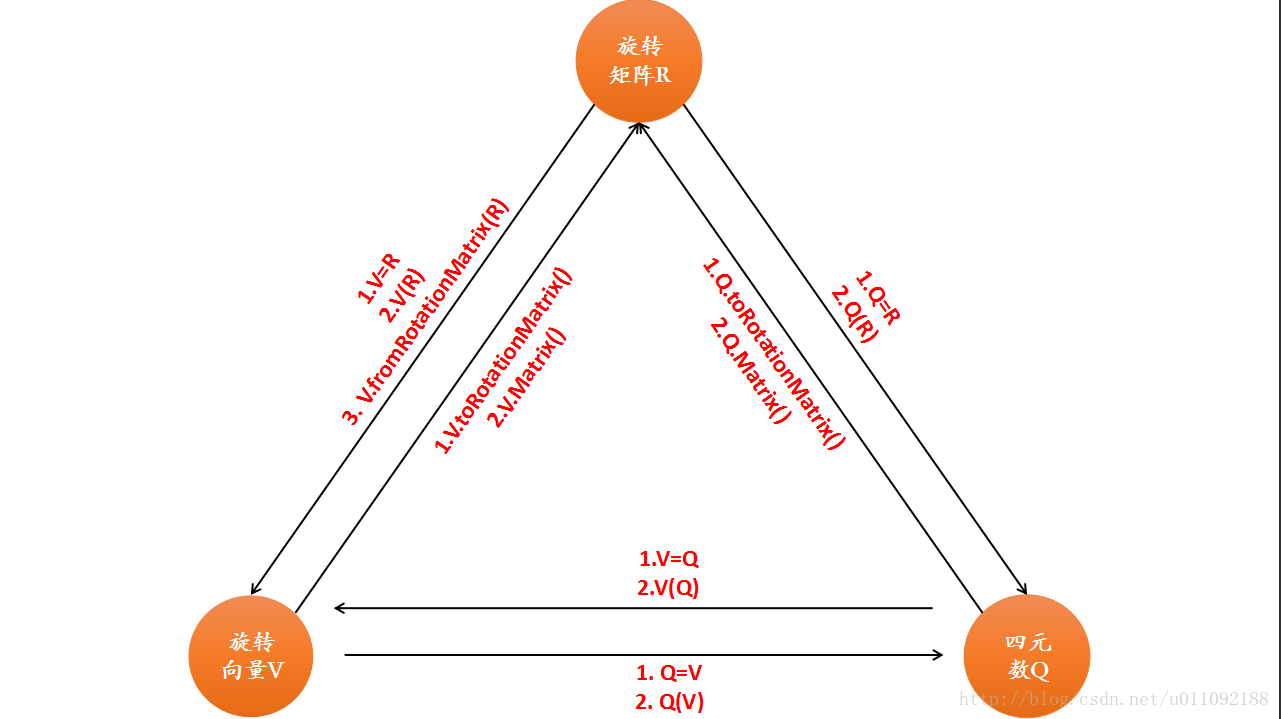
上述四種旋轉表達方式是可以相互轉化的。在Eigen中它們之間的轉化非常的方便。下圖是我看的別人總結的旋轉矩陣、四元素、旋轉向量之間的相互轉化圖:
作業
題目1:
已知旋轉矩陣定義是沿著Z軸旋轉45°。請按照該定義初始化旋轉向量、旋轉矩陣、四元數、尤拉角。請程式設計實現:
1、以上四種表達方式的相互轉換關係並輸出,並參考給出的結果驗證是否正確。
2、假設平移向量為(1,2,3),請輸出旋轉矩陣和該平移矩陣構成的歐式變換矩陣,並根據歐式變換矩陣提取旋轉向量及平移向量。
本程式學習目標:
1、學習eigen中剛體旋轉的四種表達方式,熟悉他們之間的相互轉換關係
2、熟悉旋轉平移和歐式變換矩陣的相互轉換關係
以下是參考的程式設計框架:

題目2:
我們知道單位四元數q可以表達旋轉。一個三維空間點可以用虛四元數p表示,用四元數 q 旋轉點 p 的結果p’為:
證明:此時 p′ 必定為虛四元數(實部為零)。
"計算機視覺life"公眾號選單欄回覆:“旋轉”,即可下載題目1程式碼框架和輸出參考結果。
相關閱讀
---------------------
作者:electech6
來源:CSDN
原文:https://blog.csdn.net/electech6/article/details/83316205
版權宣告:本文為博主原創文章,轉載請附上博文連結!